欢迎来到同创机电一体化技术!






同创机电一体化技术
联系电话:15360177870
红外车辆分离光栅LCMF1381应用案列
基于红外车辆分离光栅的 ETC 专用车道系统
李忠洋
摘 要:本文先总结一下传统 EYC 专用车道系统,在实际运行中存在的跟车干扰、通行速度慢等问题,分析造成上述问题的原因;然后,根据红外车辆分离光栅的工作原理,阐述解决上述问题的方案;最后阐述基于红外车辆分离光栅的 ETC 专用车道系统的设计方案。
关键词:ETC 车道系统; 跟车干扰、收费效率提速;红外车辆分离光栅
注:红外车辆分离光栅=红外车辆分离器(含保护罩)
1 引言
电子不停车收费系统(Elcctronic Toll Collcction)作为智能交通系统的一个重要组成部分, 已成为提高高速公路交通管理通行效率的重要手段。它能够最大限度地缓解收费站的交通瓶颈,避免因收费效率低下而引起的交通堵塞和车辆延误,达到了高速公路通行快速、便捷的目的。
某市高速公路 ETC 系统自 2010 年初开始建设,经历一、二、三期工程,目前已经实现高速公路收费**的 ETC 全覆盖,全市开通运行的 ETC 车道达到 364 条;实现车辆通行速度主线车道不低于 40km/h,ETC 混合车道不低于 30km/h;实现 ETC 车道布局方案、布设位置及附属设施和外观的完全统一。
截至 2019 年 3 月,某市 ETC 用户已超过 107 万,其中周一至周五 ETC 日均流量达 38 万车次,约占整个高速公路网总流量的 35%,极大地缓解了高速公路道口拥堵现象。
在某市 ETC 系统建设初期,考虑到用户数量较少、ETC 车道普及率不高等多种因素,建设ETC 专用车道、MTC 混合车道等多种类型的 ETC 车道,在 2010 中,随着 ETC 用户及交易数量的不断增长,ETC 车道的使用率不断提高,这些前期设计的车道系统问题逐步显现,主要表现在:跟车干扰问题严重、车辆通行速度慢、恶意闯关逃费等多个方面。
本文从传统 ETC 车道系统存在的问题及原因、红外车辆分离光栅在 ETC 车道系统中的应用、基于红外车辆分离光栅的 ETC 车道系统等多个方面阐述红外车辆分离光栅在 ETC 专用车道中的应用。
2 传统 ETC 专用车道系统存在的问题
某市高速公路 ETC 系统自 2010 年年初开始建设,其 ETC 专用车道系统基本布局方案如图 1 所示。
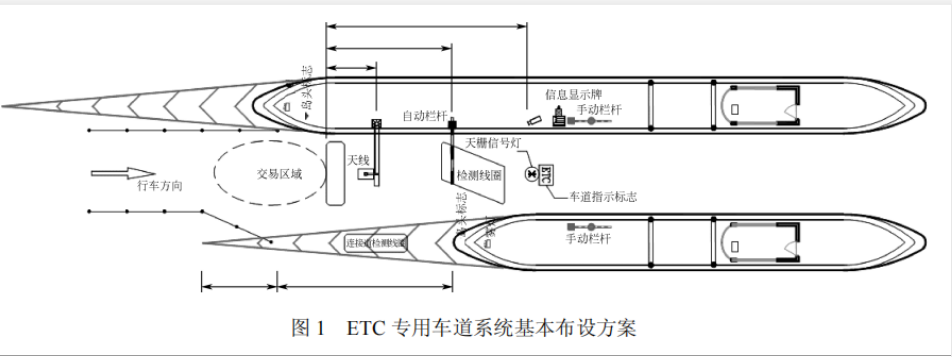
在该车道系统中,车道软件主要依靠地感线圈、车辆检测器,实现逻辑控制,完成车道交易及处理流程。
随着 ETC 用户及交易数量的不断增长,ETC 车道的使用不断提高,该车道系统的问题逐步显现,主要表现:跟车干扰、通行速度慢、不能**控制栏杆机等三个方面,下面详细阐述造成这些问题的原因。
2.1 跟车干扰
在 ETC 车道系统中,天线通信区域的长度通常设定为 6-8 米,一般小型车的长度在 4-5 米之间,因此,存在两车同时处于通信区域的情况,当前面的车辆为非 ETC 车辆或者为交易失败的 ETC 车辆而后面 ETC 交易成功时,车道系统有可能无法将交易结果与车辆通行顺序一一正确匹配,造成放行前车而拦截后车,即放行非 ETC 车辆或者交易失败的 ETC 车辆,拦截交易成功的 ETC 车辆,此种情况我们称之为跟车干扰。
在现有车道系统中,通过天线与车载电子标签通信,从而唤醒电子标签完成 ET 交易;通过地感线圈车辆检测器输出的脉冲信号区分车辆,形成车辆的通行顺序队列;车道控制软件将电子标签的唤醒时序、交易完成时序、交易完成情况及车辆抓拍信息与车辆通行顺序队列相结合并一一匹配,从而形成整体车辆顺序队列,并根据此队列指令控制栏杆机的抬杆、落杆、放行、拦截车辆并报警提示,如果匹配错误就会造成跟车干扰。
造成匹配错误的主要原因有以下两个方面。
(1) 地感线圈无法正确区分车辆
在现有车道系统中,车道软件通过地感线圈车辆检测器输出的脉冲信号区分车辆,形成车辆的通行顺序队列。地感线圈通过车体金属与线圈电磁感应形成输出控制脉冲信号识别车辆, 当两辆车以小于地感线圈横截面间距通过地感线圈时,车体金属不会引其起磁通量的变化, 测量检测器就无法输出正确的脉冲信号,即两车通过只有一次脉冲信号,此时,就会造成车道软件的车辆通行顺序队列错误。
在 ETC 系统建设初期,用户数量较小,车道使用率不高,车辆可以以较快的速度通过车道, 此时,车辆间距较大,基本不会出现车辆检测器无法正确区分车辆的问题;随后 ETC 用户及交易数量的不断增长,ETC 车道的使用率不断提高,在大部分省会城市的某些 ETC 收费道口, 高峰小时流量已经超过了 1500 辆,此时,车辆通行速度很低,车辆间距较小,跟车干扰现象频繁发生,已经影响到车道系统的正常运行。
(2) 电子标签唤醒灵敏度差异较大
在车道系统运营中,不同厂商之间的天线与电子标签在兼容与稳定性上依然存在一定缺 陷,造成电子标签的唤醒的灵敏度差异较大,不同厂商的天线与电子标签之间交易区域差距可以达到 2 米,即使同一厂商的不同电子标签在同样条件下交易区域有时也有 1 米的差距。若将交易区域做严格控制,会造成唤醒灵敏度不高的电子标签交易失败,因此,为了保持系统运行的兼容性和交易成功率,通常将交易区域控制在系统允许的上限,随着 ETC 用户及交易数量的不断增长,ETC 车道的使用率不断的提高,跟车干扰问题就很突出,极大的增加了车道系统的运营管理难度。
(2.2) 通行速度慢
在 ETC 车道系统实际运营中,一般要求车辆平滑通行速度能够达到 30KM/h,才能给车辆驾驶人员较好较好的用户体验。根据现行国家标准要求双片式电子标签的典型交易时间时间为 270ms,并且考虑到 ETC 专用车道不能取消栏杆机的状态,交易区域前端到栏杆机的距离要达到 20 米才能满足平滑通行速度 30KM/h 的要求。
根据对跟车干扰问题的分析,跟车干扰现象主要由于在车辆间距较小时地感线圈无法正确分车以及不同厂商的天线与电子标签在兼容性与稳定性上仍然存在一定缺陷两个关键硬件设备原因造成的,无法从从车道软件逻辑上进行弥补,在现有条件下,随着 ETC 用户及交易数量的不断增长,ETC 车道的使用频率不断提高,跟车干扰问题会越来越突出,极大的增加了车道控制系统运营管理难度。
因此,为了降低跟车干扰的问题对车道系统正常运营管理的影响,将交易区域前端到栏杆机的距离压缩到 8 米,此时,车辆平滑通行速度仅能够达到 10KM/h,用户体验较差。
(2.3) 不能精准控制栏杆机
在现有车道系统中,车道软件通过地感线圈车辆检测器输出的脉冲信号区分车辆,在车辆通过地感线圈后,控制栏杆机落杆,随着 ETC 用户及交易数量的不断增长,ETC 车道的使用频率不断提高,这种控制方式的弊端逐渐显现。
1) 、恶意闯关逃费
为了防止由于线圈磁通量抖动造成的栏杆机错误落杆砸车现象,地感线圈的横截面通常设定较大,也就是说当两辆车以间距小于地感线圈横截面通过时,地感线圈就无法区分车辆、输出正确的脉冲信号,即使系统判断第二辆车为非 ETC 车辆或交易失败 ETC 车辆,也无法在**辆车通过后发出落杆指令,从造成第二辆车可以恶意闯关逃费,且 ETC 专用车道一般无人值守,更为驾驶员恶意闯关逃费带来了便利。
2) 、 无法**检测车辆通过
在主线收费站,为了更好的用户体验,我们加大了交易区域前端到栏杆机的距离,使车辆平滑通过速度能够达到 30KM/h 以上。随着车辆通行速度的提高,地感线圈车辆检测器响应速度慢点缺点逐渐显现,特别是在多辆交易成功的 ETC 车辆连续通过时,除**辆车外, 后续车辆的通行速度已经超过 30KM/h 此时,受响应速度的制约,车辆检测器无法检测到车辆通过,造成交易成功车辆通过后,栏杆机不落杆,此种情况偶有发生;
3 红外光栅车辆分离器在 ETC 专用车道系统中的应用
3.1 红外光栅车辆分离器的工作原理
红外光栅车辆分离器的原理是通过线性排列的红外光发射和接收来实现对车辆的同步扫描,发射器内置线性排列的高能量发光元件,接收器内置与发射器数 量相同的接收元件,发射器和接收器的对应光电元件依次按 顺序同步触发,形成由多组平行的红外线光形组成的光幕, 设备检测光路是否导通, 当汽车通过扫描区域时,部分或全 部光束被遮挡, 车辆被检测出,如图2 所示[1,3]。
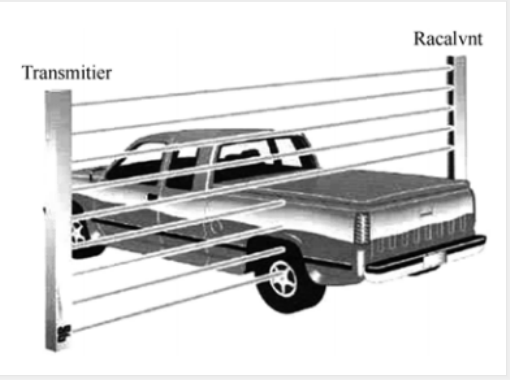
图 2 红外光栅车辆分离器原理
当车辆被检测后,设备将光信号转换为电信号输出,从而实现对车辆数据的综合检测,与其它检测技术相比,红外 光栅车辆分离器产品技术成熟,安装简便, 高速响应,抗干 扰性强,可输出丰富的车辆数据信息,能可靠检测各种特殊车辆[1,3]。红外光栅车辆分离器是专为公路收费系统车辆**分离检测而设计的,其主要应用于计重收费系统,将其引入ETC 车道系统,主要利用了其大大优于地感线 圈的响应速度及车辆**分离检测能力[1,3]。
3.2 红外光栅车辆分离器在ETC 专用车道系统中的应用可行性
在了解了红外光栅车辆分离器的工作原理后,我们知道其主要是靠判断红外线光形组成的光幕是 否被遮挡来判断车辆的存在并区分车辆的,由于红外线光形组成的光幕在车辆行进方向上不存在横截 面的问题,因此,在区分车辆方面,具有地感线圈无法相比的先天优势,其响应时间、最小分车间隔 等性能参数与车辆间距无关,只与设备自身的工作原理、芯片的工作速度有关。目前,市场上性能较 好的红外光栅车辆分离器,其响应时间一般在10ms,最小分车距离为100mm,可以满足ETC 专用车 道应用要求[2,3]。
但是,红外光栅车辆分离器也有自身的缺点,其无法分辨遮挡光幕的物体是否是车辆, 也就是说 当人经过时,也会触发相应的脉冲信号,而地感线圈正好可以克服这个缺点[2,3]。
因此,并不能单纯用红外光栅车辆分离器替代现有的地感线圈,必须将两者结合使用, 并配合以 相应的软件处理流程[2,3]。
3.3 红外光栅车辆分离器在ETC 专用车道系统中的应用原理
3.3.1 防止跟车干扰
通过前文的分析我们知道,造成跟车干扰问题的原因比较复杂,包含:天线通信区域、电子标签 唤醒灵敏度、车辆速度以及车道硬件设备区分车辆的能力等,仅仅用红外光栅车辆分离器代替地感线 圈,并不能解决跟车干扰问题方面,必须从多个方面考虑,并配合以复杂的车道软件处理流程。
某市高速ETC 车道系统对红外光栅车辆分离器的应用,分为两个阶段,两个阶段的车道布设方
案、功能、性能等设计参数均不一致,从而形成了两个解决跟车干扰的方案。由于考虑到软件流 程的知识产权问题,在此并不能将具体的处理流程全部展现出来,只能对两个方案的设计思想做个简 单介绍。
3.3.1.1 方案一
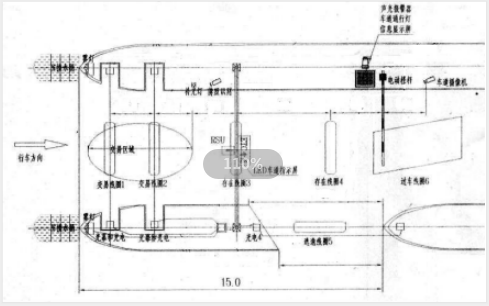
基于本方案的ETC 专用车道主要应用于某市高速公路ETC 二期工程,该车道的设计平滑通行速 度为30km/h,红外光栅、天线通行区域的布设方案如图3 所示。
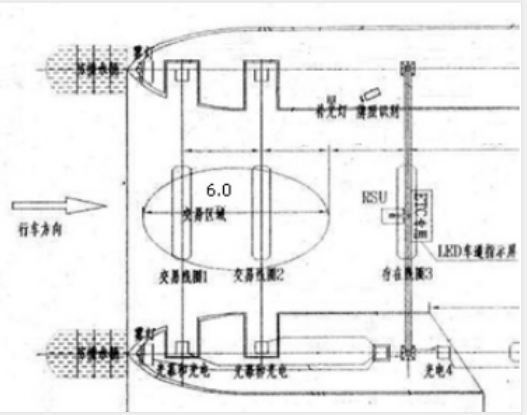
图 3 红外光栅、天线通行区域的布设方案一
(1) 解决跟车干扰的原理 在本方案中,天线采用常开模式,主要通过电子标签的唤醒与车辆到达**根红外光栅的前后时
序,实现车辆类型的基本判断,并将ETC 交易完成情况与车辆通过**根红外光栅相结合, 实现 ETC 交易结果与车辆通过车道顺序的一一匹配;为了解决电子标签唤醒灵敏度的差异,尤其是处理唤醒速 度较慢的电子标签,因此,设置了第二根红外光栅,并结合天线通信区域、车辆行驶方向以及车辆经 过光栅的时序等因素,来处理电子标签唤醒灵敏度的差异。在ETC 交易结果与车辆通过车道顺序的一 一匹配后,即可形成车道车辆队列。
设置光电开关是为了判断车辆行驶方向;设置地感线圈是为了消除人通过红外光栅对系统的影响。
(2) 优缺点
优点:在本方案中,不需要通过红外光栅触发天线,天线采用常开模式,ETC 交易流程只与天线、 电子标签有关,当红外光栅发生故障时,系统可以屏蔽发生故障的红外光栅, 然后继续使用。
缺点:由于在本方案中,天线采用常开模式,因此,该方案无法支持并排ETC 车道的应用。
3.3.1.2 方案二
基于本方案的ETC 专用车道主要应用于某市高速公路ETC 三期工程,该车道的设计平滑通行速 度为40km/h,红外光栅、天线通行区域的布设方案如图4 所示。
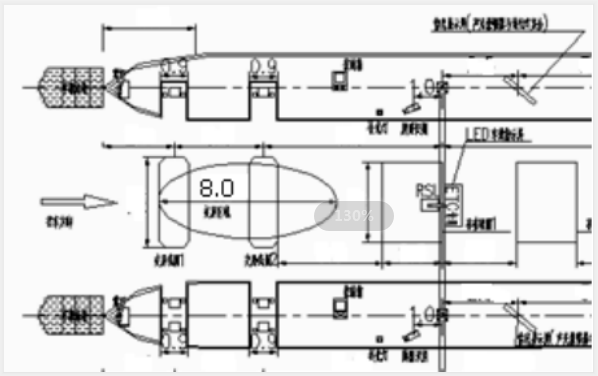
1)解决跟车干扰的原理
在本方案中,天线采用常闭模式,通行区域长度加长至 8 米,当车辆到达**根红外光栅后,天 线打开;本方案主要通过电子标签的唤醒情况与车辆通过**根红外光栅的时序,实现车辆类型的基 本判断,并将 ETC 交易完成情况与车辆到达第二根红外光栅相结合,实现ETC 交易结果与车辆通过车 道顺序的一一匹配;在本方案中,设置了第二根红外光栅除了解决电子标签唤醒灵敏度的差异,尤其是处理唤醒速度较慢的电子标签,其更重要的作用是由于随着车辆通行速度的增加,ETC交易重试的 次数必然有所增加,第二根红外光栅更重要的目的是为了再次触发交易,对交易失败的电子标签进行 交易重试。在ETC 交易结果与车辆通过车道顺序的一一匹配后,即可形成车道车辆队列。
|
|
设置光电开关是为了判断车辆行驶方向;设置地感线圈是为了消除人通过红外光栅对系统的影响。 |
优点:本方案的车辆通行速度可以达到40km/h,并且支持并排ETC 车道的应用,通过实际测试, 通过红外光栅触发天线对交易成功率无任何影响;
缺点:由于在本方案中,天线是通过光栅触发打开,在红外光栅发生故障时,系统无法屏蔽发生 故障的红外光栅。
3.3.2 提升通行速度
在解决了跟车干扰问题后,车辆通行速度主要由以下两个因素决定:典型ETC 交易时间、天线交 易区域前端与栏杆机的距离。
对于典型ETC 交易时间,根据国标要求其应小于270ms,在实际运行中,虽然不同厂商之间的天 线与电子标签在兼容性与稳定性上仍然存在一定欠缺,但是,在通信链路正常、无交易重试的情况下, 其典型ETC 交易时间均小于270ms。通过优化车道软件流程,在实际运行中,平均典型ETC 交易时间 为220ms。假设车辆车辆通行速度为80km/h,即每100ms 经过2.22 米,考虑到车辆长度差异,只要天 线通信区域不低于6m,应该可以保证交易成功率,且该结果已经通过了大量数据测试。
在排除典型ETC 交易时间这个因素后,车辆通行速度的决定性因素就是天线交易区域前端与栏杆 机的距离;车道系统只要在充分考虑安全因素的前提下,通过加大天线交易区域前端与栏杆机的距离 就可以提升车辆的通行速度,根据数据计算及大量数据测试, 车辆通行速度与天线交易区域前端与栏 杆机的距离的大致关系如下。
(1) 当要达到车辆平滑通行速度 30km/h 时,天线交易区域前端与栏杆机的距离至少需要达到15米,此时,车辆极限通行可以达到40km/h。
(2) 当要达到车辆平滑通行速度 40km/h 时,天线交易区域前端与栏杆机的距离至少需要达到20米,此时,车辆极限通行可以达到60km/h。
3.3.3 **控制栏杆机
3.3.3.1 布设方案及原理
通过上文的分析,我们已经知道现有车道系统无法**控制栏杆机的具体原因,而红外车辆分离 器恰好可以解决现地感线圈车辆检测器存在的问题,在将红外光栅 车辆分离器引入车道系统后,其设备具体布设方案如图5 所示。
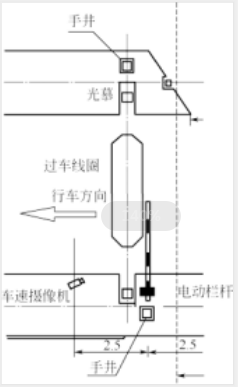
图 5 **控制栏杆机的设备布设方案
在车道系统中,车道软件通过红外光栅车辆分离器的脉冲信号 区分车辆,并配合以地感线圈车辆检测器信号,控制栏杆机落杆, 其基本处理流程如下。
(1)圈车 辆检测器的输入信号,同时保留一个车道车辆状态标志 车道软件不断轮询读取红外光栅车辆分离器和地感线。
(2) 当检测到输入状态为:红外光栅车辆分离器有车、地感线 圈车辆检测器有车且车道车辆状态标志无车时,车道软件置车道车 辆状态标志为有车。
(3) 当检测到输入状态为:红外光栅车辆分离器无车、且车道 车辆状态标志有车时,栏杆机落杆,车道软件置车道车辆状态标志 为有无车。
(4) 当检测到红外光栅车辆分离器输入信号有变化,而地感线圈车辆检测器输入信号无变化时,应判断为非车辆通过,车道软件 不做任何处理。
3.3.3.2 数据分析
通过以上的车道软件逻辑描述,我们知道正确检测到车辆到达和离开是**控制栏杆机落杆的关 键,要实现这个关键步骤,红外光栅车辆分离器的响应速度和分车能力、地感线圈车辆检测器的响应 速度是重要技术指标。
(1)车辆极限通行速度
通过大量测试数据,我们认为在通过 ETC 专用车道时,车速达到60km/h 已经接近极限速度了, 因此,假设车辆已 60km/h 通过车道,即每 100ms 通过 1.6m,按一般小型车长4 米计算,其通过光栅 及地感线圈需要250ms。
(2) 红外光栅车辆分离器的响应速度和分车能力 在车道逻辑中,红外光栅车辆分离器是核心设备,其响应时间一般在 10ms,最小分车距离为
100mm,根据以上两个性能参数并结合车辆最高通行速度,我们认为其能够满足应用要求。
( 3) 地感线圈车辆检测器的响应速度 在车道逻辑中,地感线圈车辆检测器主要用来判断车辆是否存在,而不是用来区分车辆,在极限
通行速度下,车辆通过地感线圈需要 250ms,远远大于一般车辆检测器的响应时间,我们认为其能够 满足应用要求。
4 基于红外光栅车辆分离器的ETC 专用车道系统
某市高速公路 ETC 车道系统对红外光栅车辆分离器的使用是伴随着其建设工程展开的,在其二 期建设工程中**引入红外光栅车辆分离器,称之为**代基于红外光栅的ETC 专用车道系统,车道 布设方案如图6 所示。
该车道系统基本解决了跟车干扰问题,并将车辆平滑通行速度提高至 30km/h,极限通行速度达到 40km/h。
 |
在实际运营中,我们发现了该车道系统的一些不足之处,并在随后的ETC 三期建设工程中做了改 进、完善,称之为第二代基于红外光栅的ETC 专用车道系统,分为栏杆前置和栏杆后置两种模式:所 谓“栏杆前置”,是指与相邻的 MTC 车道相比,电动栏杆被移到原 MTC 车道岛头的位置,并在栏杆 附近设置收费亭,所谓“栏杆后置”,是指将栏杆设置在收费车道的中后端,与原 MTC 车道一致,不 设与相邻 MTC 车道之间连接道,收费亭设置也与原MTC 车道一致,车道布设方案如图7 所示。

|
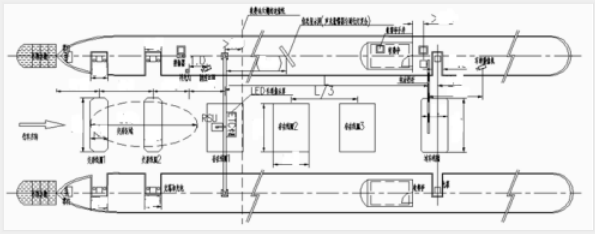
图 7 某 市三期建设的高速公路 ETC 车道系统布设方案
该车道系统完全继承了上一代系统的优点,并将车辆平滑通行速度提高至40km/h,极限通行速度 达到60km/h,还做了如下改进:
(1) 通过红外光栅车辆分离器的脉冲信号区分车辆,并配合以地感线圈车辆检测器信号,实现了 栏杆机的**控制。
(2) 对于栏杆前置模式,将收费亭迁前移至栏杆处,当非人为原因造成ETC 车辆交易失败时,可 以在本车道人工刷卡通行,不用再通过连接道转入旁边的人工车道处理。
(3) 在主线收费站的车道采用对开式电动栏杆,进一步提高栏杆机的响应速度。
(4) 更换全点阵式费额显示牌,提升人机交互界面的美观程度,提升用户使用感受。 两代车道系统的主要参数比较如表1 所示。
表 1 两代车道系统主要参数比较
|
|
第二代 |
第三代 |
|
红外光栅车辆分离器 |
2 组前置 |
3 组(两组前置,一组位于栏杆后方 |
|
天线立杆与栏杆距离 |
7 米 |
13 米 |
|
通信区域最远端与栏杆 |
15 米 |
20 米 |
|
电动栏杆 |
0.6 秒(单栏杆) |
0.3 秒(对开式) |
|
舒适通行速度 |
30km/h |
40km/h |
|
跟车干扰 |
基本消除 |
基本消除 |
|
不落杆现象 |
存在 |
基本消除 |
5 结束语
电子不停车收费系统(Electronic TollCollection)作为智能交通系统的一个重要组成部分,已成为 提高高速公路管理的科技含量和通行效率的重要手段,它能够最大限度地缓解收费站的交通瓶颈,基 于红外光栅车辆分离器的ETC 专用车道系统,进一步提升了电动栏杆的抬落杆速度,提升了车辆的舒 适通行速度,同时解决了跟车干扰等问题。目前, 该车道系统已经成功应用于某市高速公路网的 200 多根 ETC 专用车道,除去人为原因后, 该车道系统交易成功率可以达到 99.7%,在主线收费站,该ETC 专用车道系统的日平均车流量超过8000 辆,高峰小时车超过1000 辆。

